Jul 7, 202618 min read
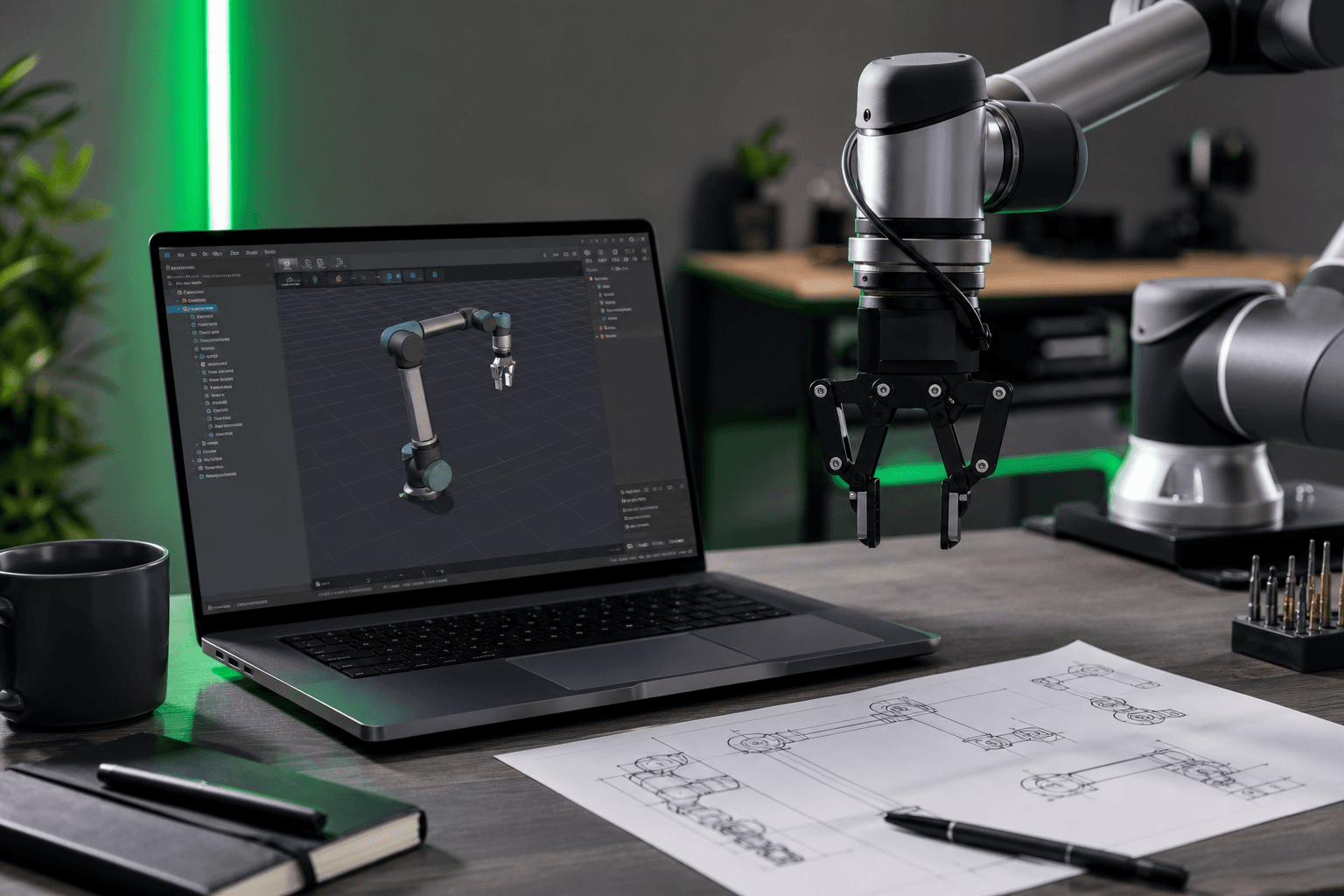
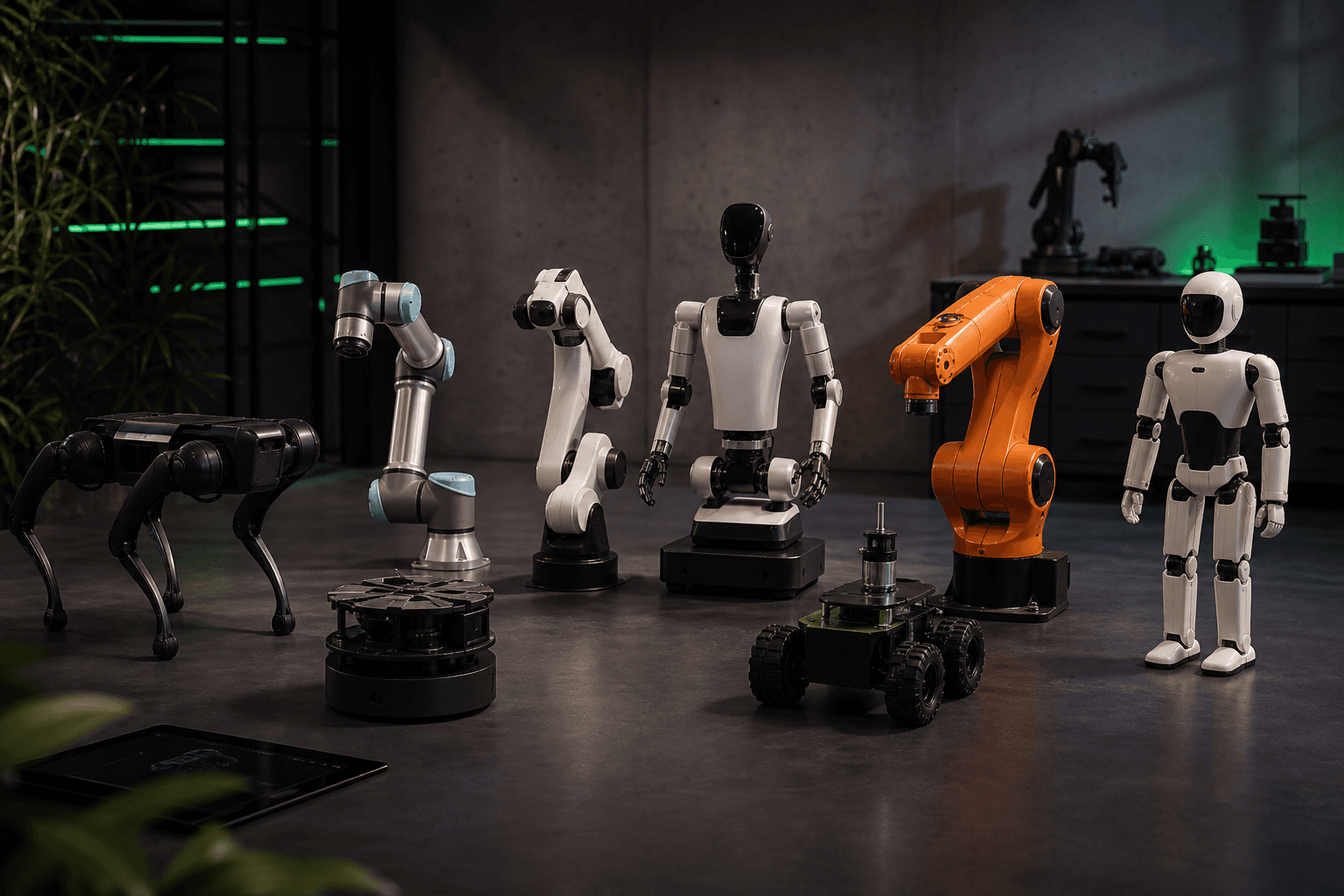
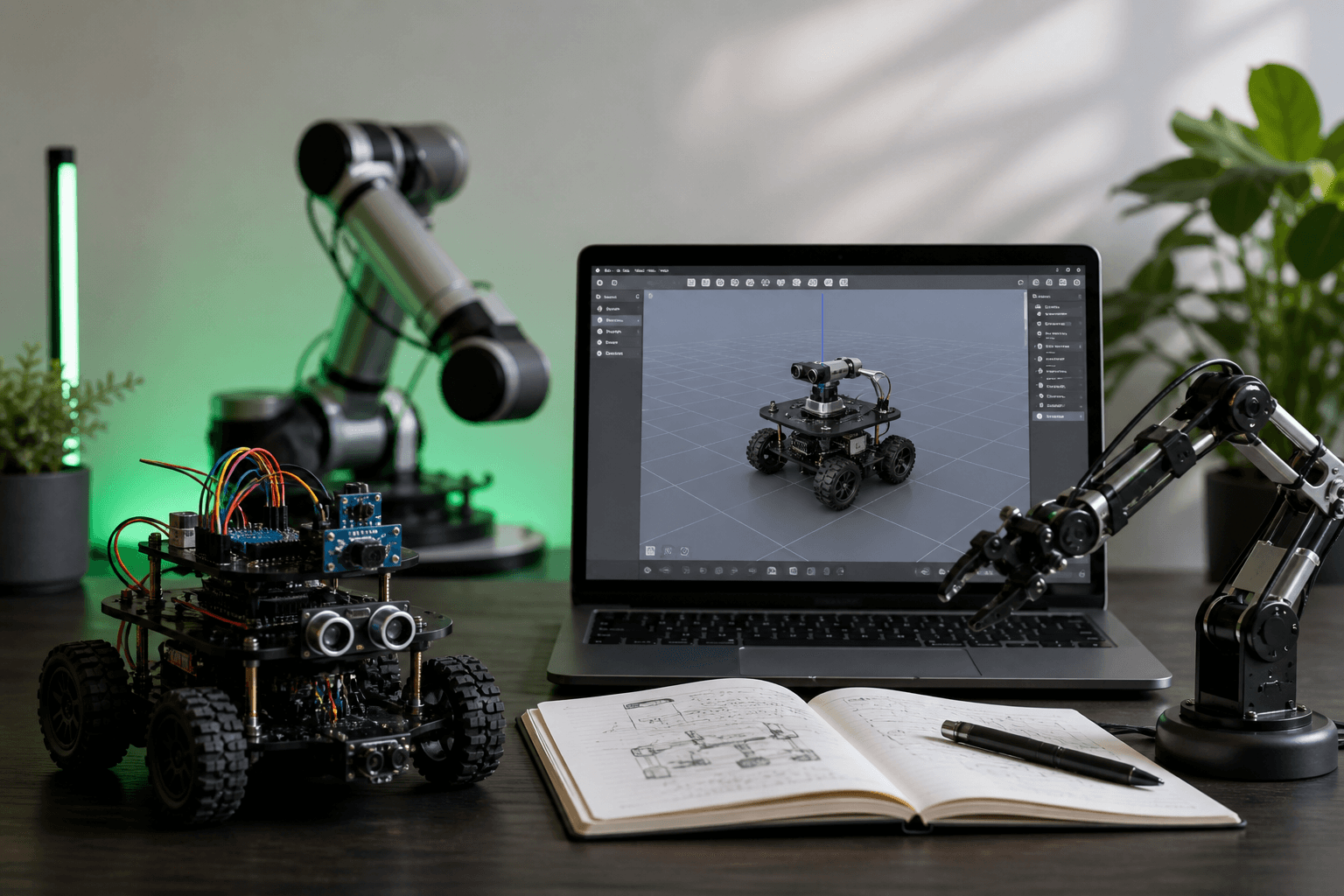
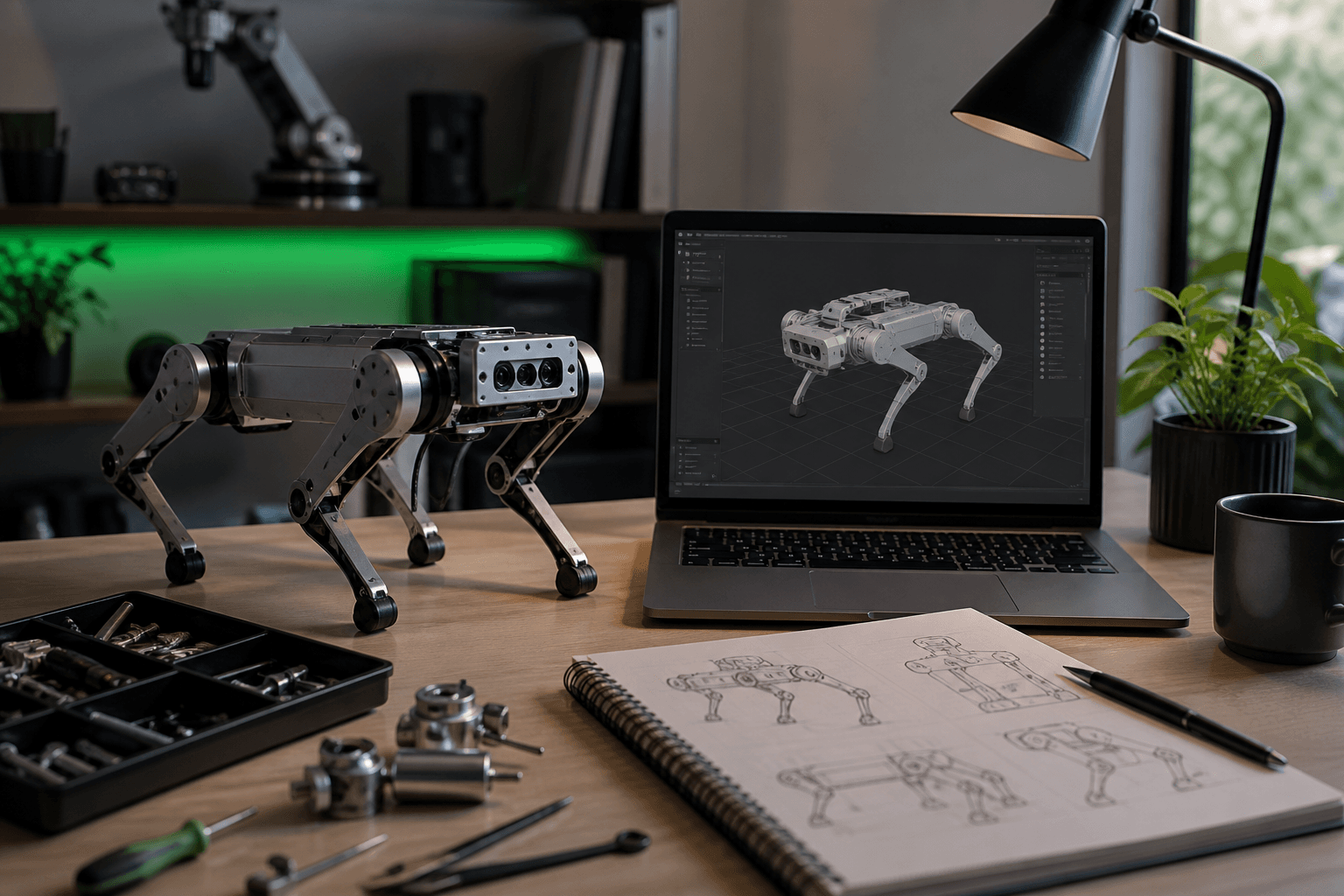
How to Make a Robot: A Beginner's Roadmap from Idea to Simulation
How to make a robot without buying hardware—build it in simulation using URDF, follow a 6-step pipeline, and avoid the mistakes that break first builds.
Read more